Table of Contents
CARLsim-ECJ Parameter-Tuning Framework Overview
CARLsim now has a software interface to an evolutionary computation system written in Java (ECJ) (Luke et al., 2006) to provide an automated parameter tuning framework. We found that an automated tuning framework became increasingly useful as our SNN models became more complex. Evolutionary Algorithms (EAs) enable flexible parameter tuning by means of optimizing a generic fitness function. The first version of the automated paramter-tuning framework used an EA library called Evolving Objects (EO) as the EA engine (Carlson et al., 2014). ECJ was chosen to supercede EO because it is under active development (Linux), supports multi-threading, has excellent documentation, and implements a variety of EAs (Luke at al., 2006).
Source: Beyeler et al., 2015
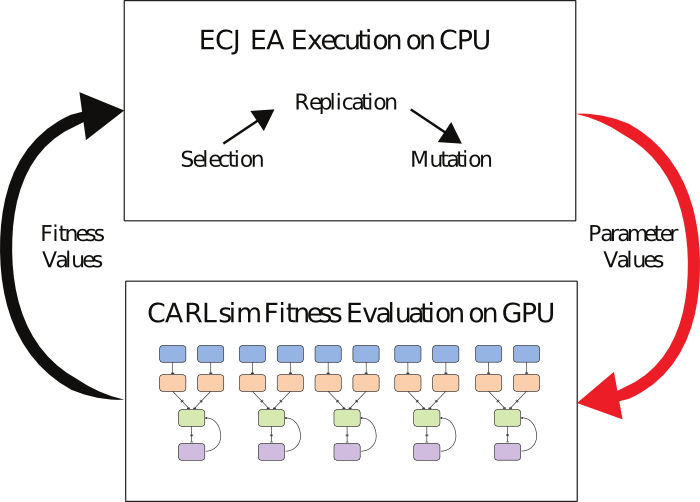
Fig. 1 shows the general approach of the automated parameter tuning framework. ECJ implements an EA with a parameter file that includes: EA parameters, the number of individuals per generation, and parameter ranges. Each step of the EA is executed by ECJ except for the evaluation of the fitness function, which is completed by CARLsim. CARLsim evaluates the fitness function in parallel by running multiple SNN individuals simultaneously on the GPU, where the bulk of the computations occur. ECJ is written in Java, which is slower than C, but the majority of the execution time is spent running CARLsim’s optimized C++/CUDA code. At the beginning of every generation, the parameters to be tuned are passed from ECJ to CARLsim using standard input/output streams in Linux. CARLsim evaluates individuals in parallel and returns the resulting fitness values to ECJ via standard streams. The tuning framework allows users to tune virtually any SNN parameter, while the fitness functions can be written to depend on the neuronal activity or synaptic weights of the SNN.
- Since
- v3.0
10.2 Installation
The current version of the CARLsim paramter-tuning framework uses Evolutionary Computations in Java (ECJ) (tested using version 23). For information on how to install ECJ, please go here.
After ECJ has been installed, the user then needs to set the ECJ_DIR and ECJ_PTI_DIR environment variables in the ~/.bashrc file. The ECJ_DIR environment variable points to the ECJ installation .jar file (it should be inside a directory named jar and named as ecj.xx.jar). The ECJ_PTI_DIR environment variable points to the desired installation location of the CARLsim-ECJ PTI library.
We will also need to install apache ant (tested version is 1.9.6). Download the ant binary from ant archive and extract it.
Users can set these environment variable in their ~/.bashrc file. The following example lines would be appended to .bashrc. For mac OS, these variables are placed in ~/.bash_profile.
- Note
- You may have to open a new shell or reboot to get export these variables.
Once the environment variables have been set. Navigate to tools/ecj_pti and run:
This will install the CARLsim-ECJ PTI static library into the location pointed to by ECJ_PTI_DIR.
If you have already installed gtest in the CARLsim4 source tree, you can run the unit tests for CARLsim-ECJ PTI's C++ components, as:
Also navigate to the doc/source/tutorial/7_pti directory and try that example to verify installation. More on this in Tutorial 7: Parameter Tuning Interface (PTI).
- Since
- v3.0
10.3 ECJ Usage
In general, users will create their own project directory and model it after the tutorial program found in tut5_pti. Users configure a ECJ parameter file and implement a CARLsim fitness evaluation function. ECJ performs the EA utilizing the user-defined parameter file and runs the CARLsim 'main' program every generation to evaluate the fitness for all individuals in parallel. Each individual represents a different SNN with a unique set of parameter values. ECJ outputs the fitness and parameter files to log files every generation. Parameter values from high-fitness SNNs can then be used in SNN modeling and simulation.
First the ECJ configuration file must be edited. Parts of the ECJ configuration file are shown below:
It's probably easiest to start with this ECJ parameter file and modify it to your project's needs. The particular variables the user needs to edit are:
eval.problem.simulationCommand: which is the name of the carlsim binary ECJ executes every generation to evaluate the fitness function. The $ sign means the path is relative to the location of the parameter file.
generations: number of maximum generations to run.
pop.subpop.0.size: number of individuals in each generation.
pop.subpop.0.species.genome-size: total number of parameters to be tuned in each individual.
pop.subpop.0.species.min-gene: default minimum range value for all parameters to be tuned
pop.subpop.0.species.max-gene: default maximum range value for all parameters to be tuned
To specify the parameter range for each parameter individually, you define min-gene and max.gene values for additional pop.subpop members as is shown in the code below:
However,you still need to keep the pop.subpop.0.species.min-gene and pop.subpop.0.species.max-gene in the parameter file.
for more information about the ECJ configuration file, please visit the ECJ homepage.
Users then need to implement their own CARLsim evaluation function. The overall structure is as follows. A specific Experiment class is implemented and inherited from the base Experiment class:
The only class functions functions are the default class constructor and the run function. The run function is where CARLsim code is written and executed. At the final step, the fitness values are output back to ECJ using standard Linux streams.
- Since
- v3.0
References
References
Beyeler, M., Carlson, K. D., Chou, T. S., Dutt, N., Krichmar, J. L., CARLsim 3: A user-friendly and highly optimized library for the creation of neurobiologically detailed spiking neural networks. (Submitted)
Carlson, K. D., Nageswaran, J. M., Dutt, N., Krichmar, J. L., An efficient automated parameter tuning framework for spiking neural networks, Front. Neurosci., vol. 8, no. 10, 2014.
Luke, S., Panait, L., Balan, G., Paus, S., Skolicki, Z., Bassett, J., Hubley, R., and Chircop, A., ECJ: A java-based evolutionary computation research system, http://cs. gmu. edu/eclab/projects/ecj, 2006.
